Multi-hierarchical surrogate learning for explicit structural dynamical systems using graph convolutional neural networks
 Multi-hierarchic surrogate modeling scheme
Multi-hierarchic surrogate modeling schemeAbstract
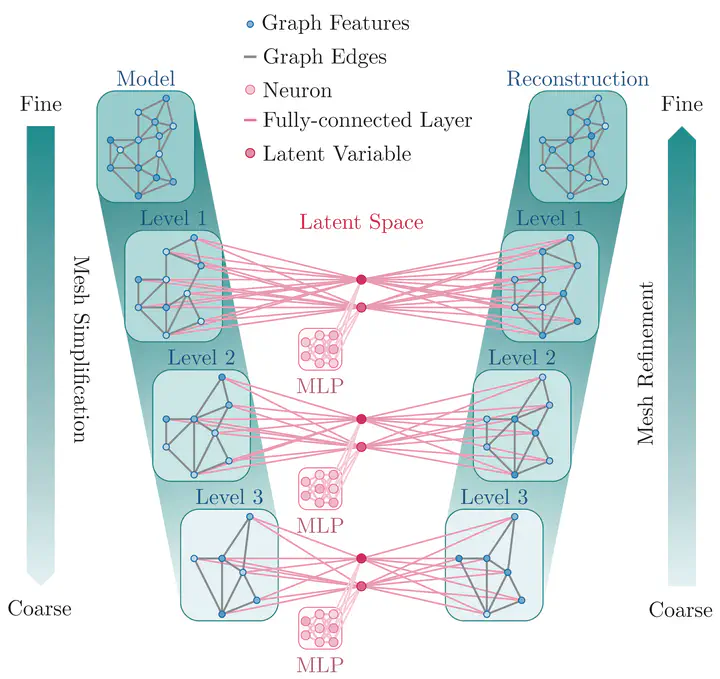
Highly nonlinear dynamic finite element simulations using explicit time integration are particularly valuable tools for structural analysis in fields like automotive, aerospace, and civil engineering, or in the study of injury biomechanics. However, such state-of-the-art simulation models demand significant computational resources. Conventional data-driven surrogate modeling approaches address this by evolving the dynamics on low-dimensional embeddings, yet the majority of them operate directly on high-resolution data obtained from numerical discretizations, making them costly and unsuitable for adaptive resolutions or for handling information flow over large spatial distances. We therefore propose a multi-hierarchical framework for the structured creation of a series of surrogate models at different resolutions. Macroscale features are captured on coarse surrogates, while microscale effects are resolved on finer ones, while leveraging transfer learning to pass information between scales. The objective of this study is to develop efficient surrogates for a kart frame model in a frontal impact scenario. To achieve this, its mesh is simplified to obtain multi-resolution representations of the kart. Subsequently, a graph-convolutional neural network-based surrogate learns parameter-dependent low-dimensional latent dynamics on the coarsest representation. Following surrogates are trained on residuals using finer resolutions, allowing for multiple surrogates with varying hardware requirements and increasing accuracy.
Add the full text or supplementary notes for the publication here using Markdown formatting.